您当前位置:网站首页 > 新闻中心
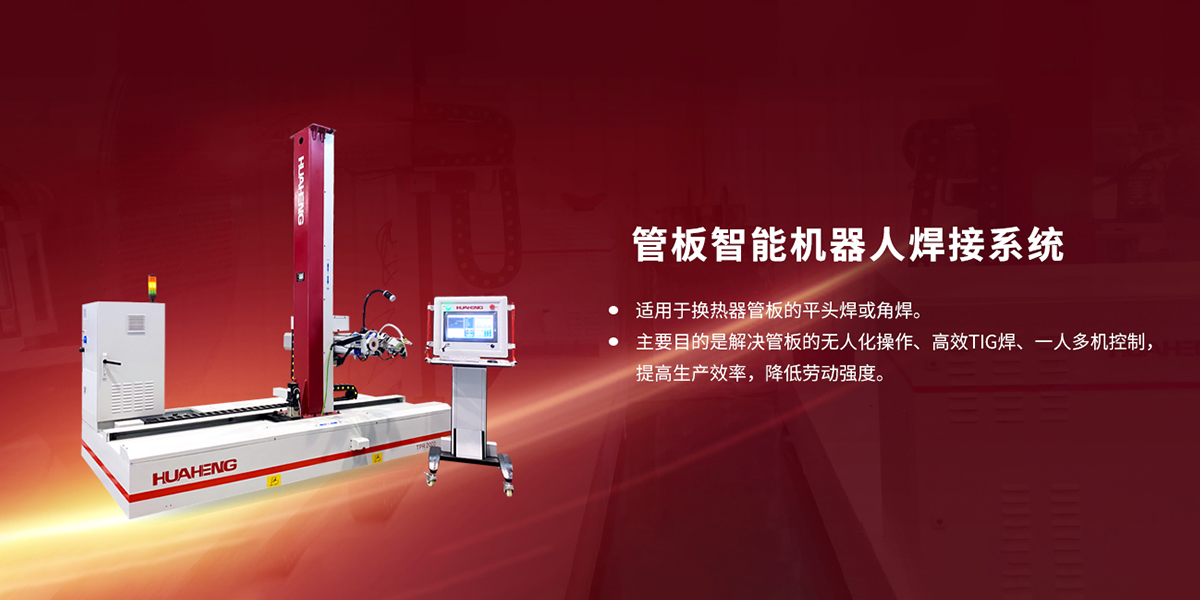
机器人焊接工艺
发布时间:2015-04-18 发布人:admin
焊接机器人根据不同的应用场合可采取不同的结构形式,这是因为多关节式机器人的手臂灵活性最大,可以使焊枪的空间位置和姿态调至任意状态,以满足焊接需要。 焊接机器人的编程方法有了更进一步的改进。 运条方法,圆圈形运条熔池温度高于月牙形运条温度,月牙形运条温度又高于锯齿形运条的熔池温度,在12mm平焊封底层,采用锯齿形运条,并且用摆动的幅度和在坡口两侧的停顿

产品分类 product class
联系方式 contact us
青岛威士德焊接设备有限公司
联系人: 高经理
联系电话:0532-67762893
传 真: 0532-67762893
移动电话:13953261598
电子邮箱:qdw1598@163.com
地址:青岛市城阳区春城路169号23号楼406室
 咨询电话:13953261598
咨询电话:13953261598 一对一客服咨询服务
一对一客服咨询服务 7x24小时在线服务
7x24小时在线服务 地址:青岛市城阳区春城路169号23号楼406室
地址:青岛市城阳区春城路169号23号楼406室 电话:13953261598
电话:13953261598 微信:
微信: 邮箱:
邮箱:
扫码查看更多
版权所有 © 2020 青岛威士德焊接设备有限公司 All Rights Reserved 鲁ICP备2023013443号-1